What I Build
从传感器、算法到产品现场的完整闭环
融合感知
激光雷达、RGB-D、多相机、IMU、RTK、Odom 数据采集、标定、同步、滤波和多源融合。
SLAM 与定位
Cartographer、ORB_SLAM3、Slam_Karto、AMCL、视觉与激光 SLAM 部署、调参和系统适配。
导航规划
Costmap、Movebase、A*、DWA、局部/全局环境地图、动态障碍跟踪和禁行区等导航能力开发。
工程落地
C++、Python、Shell、Linux、ROS、OpenCV、PCL、Pytorch、Eigen、Ceres、g2o 等工程工具链。
Selected Projects
代表项目
以真实机器人和产品场景为中心,串联感知、定位、建图、规划与调试。
2023.11 - 至今 · 汉威科技 · 重点项目
农业机器人端到端环境感知融合导航
面向割草、果园、绿化、光伏和庭院等非结构化场景,构建从传感器采集、标定同步、语义感知、局部环境建模到下游导航规划的感知闭环。项目已覆盖海外客户测试与订单验证,具备从算法研发到产品现场调试的完整链路经验。
产品背景
HARVEDEX M130 官方资料显示,该平台采用 2D LiDAR、3D LiDAR、Camera、GNSS 等传感器,定位为 AI 自主导航设备,最大工作面积可达 10,000 平方米。

Demo
打开 B 站视频
户外非结构化场景语义建图
雷达语义分割、局部语义建图与导航感知融合效果。
基础感知
传感器选型、结构布局、采集清洗、标定同步;点云滤波、地平面估计、聚类与障碍物分离。
雷达语义分割
点云半自动标注、语义真值生成;基于体素与前视图方案训练点云语义分割模型。
端到端感知融合
语义点云与图像融合、多帧累计、体素衰减、动态障碍跟踪,为导航输出稳定环境地图。
2023.06 - 2023.11 · 深兰人工智能
轮足机器人自主导航功能开发
在 RK3588 嵌入式开发板部署基于 Cartographer 的建图与定位平台,使用 IMU 对 2D Laser 数据进行俯仰方向矫正,并开发远程建图、定点导航、禁行区和语音控制接口。
2023.02 - 2023.06 · 深兰人工智能
机器人自主探索式建图
调研并重构自主探索建图方案,结合 OpenCV 优化地图边界点选取,开发 SlamManage 接口,使机器人可在未知环境中边探索、边建图。
2022.05 - 2023.01 · 深兰人工智能
VSLAM 栅格地图构建、三维重建与导航
对比 ORB_SLAM3、VINS、RTAB-Map 并进行实机部署,基于 OctoMap 实时生成栅格地图,完成深度图保留、点云插入、稠密三维重建和定位丢失后的自主重定位策略。
2020.10 - 2021.11 · 清华大学实验室
视觉语义导航与视觉语言导航
融合导航地图、语义地图与场景图谱进行长期目标搜索;同时研究 LiDAR 与 RGB-D 视觉融合的具身语言导航方法,增强复杂环境下的障碍物感知与动作决策。
2019.09 - 2022.03 · 研究生课题
人群计数与密度估计
面向拥挤场景的人群计数问题,研究多尺度上下文增强、全局推理和密度图回归方法,结合 OpenCV 实现视频流人群流量监测,并形成 SCI、会议论文和发明专利成果。
Project Demos
项目视频
把论文实验、机器人导航、语义建图和人群计数演示集中呈现,增强项目的可验证性和现场感。
Research
科研成果
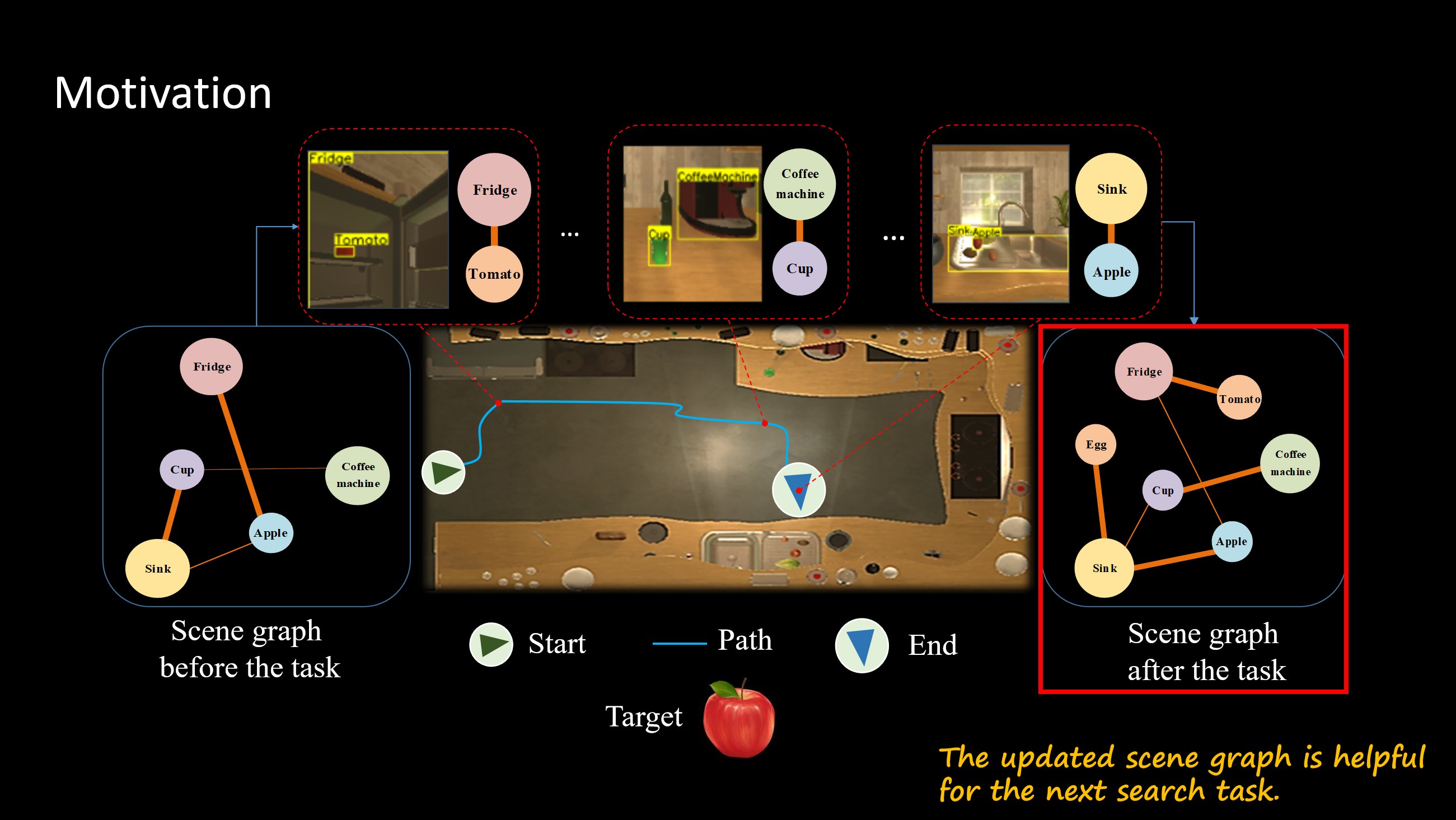
Long-term object search using incremental scene graph updating
这项工作面向长期运行机器人中的目标搜索问题:机器人不能只记住一次性的环境快照,而需要在不断变化的室内空间中持续更新“物体-位置-关系”的场景记忆。
问题
目标物体可能被移动、遮挡或消失,传统静态语义地图很容易过期。
方法
通过增量式场景图谱更新,把新观测持续写入语义关系图,让机器人在搜索过程中修正环境认知。
价值
把“感知结果”转化为可查询、可推理、可长期维护的场景记忆,为语义导航和目标搜索提供支撑。
COMAL: Compositional Multi-scale Feature Enhanced Learning for Crowd Counting
围绕拥挤场景密度估计,引入组合式多尺度特征增强学习,提升不同尺度人群区域的表达能力。
MCTS-Based Robotic Exploration for Scene Graph Generation
将机器人探索策略与场景图谱生成结合,为语义地图构建和目标搜索提供上游探索能力。
Safety Helmet Detection Based on YOLOv5
基于 YOLOv5 完成安全帽检测模型训练与实验验证,体现视觉检测工程落地能力。
MSCANet: Adaptive Multi-scale Context Aggregation Network for Congested Crowd Counting
研究拥挤人群计数中的自适应多尺度上下文聚合问题,支撑人群密度估计方向的系列成果。
SC2Net: Scale-aware Crowd Counting Network with Pyramid Dilated Convolution
关注尺度感知与金字塔空洞卷积,用于复杂密集人群场景的人数估计。
LiDAR 与 RGB-D 融合的具身语言导航
提出融合激光雷达与双目视觉的语言导航方法,增强机器人在复杂环境中的障碍物感知、避障和动作决策。
Experience
经历时间线
汉威科技(上海)有限公司
机器人研发部 - 机器人融合感知算法负责人
深兰人工智能科技(上海)股份有限公司
SLAM 算法工程师
清华大学智能技术与系统国家重点实验室
具身智能算法实习
上海应用技术大学
硕士,清华大学联合培养;研究方向为视觉语言融合的救援机器人导航。
Contact